Step 6. Verify Motor Rotation
What You Need:

RubiQ 1.0 or 1.5

Antenna
INAV 1.6.2

Micro USB

LiPo Battery
Steps:
WARNING! Remove props and attach the antenna before calibrating the ESC’s.
- Connect RubiQ to INAV and go to the Motors tab.
- Read the Motor Test Mode Notice at the bottom of the page, then click to Enable Motor Control.
- Connect the battery.
- From the Motors tab, move the Master Control slide up just slightly, until the motors are barely spinning. Note: at this point, it’s common for one or more motors to not spin along with the rest. Come back after calibrating the ESC’s in the next step and this issue should be resolved.
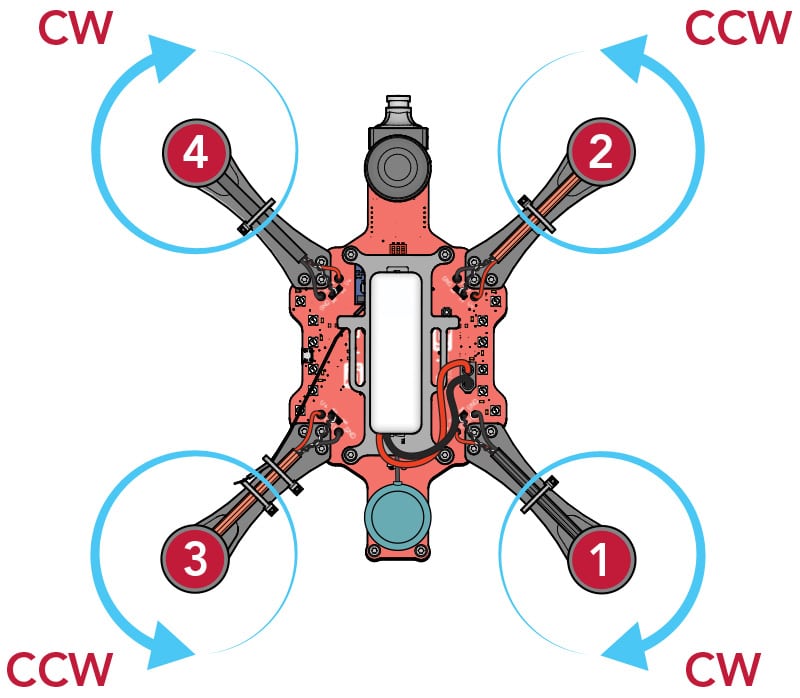
- Observe and gently touch the sides of the motors to make sure their rotation matches the image below. If not, check out the troubleshooting section below.
- After ensuring proper rotation, slide the Master Control back down and stop the motors.
If one or more motors are not spinning along with the others, move on to the next step to calibrate the ESC’s. After ESC calibration is complete, return to this step to verify the motor rotation.
If one or more of the motors is not spinning in the proper direction, consult the diagram above to make sure that the black (CW) and red (CCW) motor wires are installed on the proper arms. If they are on the proper arms and are still spinning in the wrong direction, please move to the step below.
If your motors are installed correctly but still spin in the opposite direction (black-wired motors spinning CCW or red-wired motors spinning CW), the motors may need to be reconfigured.
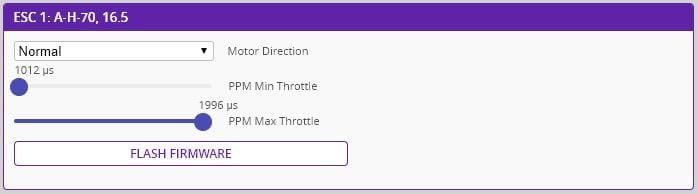
- Download BLHeli – Configurator from the Chrome web store.
- Like INAV, BLHeli can be opened directly from the Google Chrome Apps menu by clicking the Apps waffle in the top left corner of the browser and clicking the BLHeli icon. BLHeli can also be accessed by entering chrome://apps in the search bar.
- Make sure the props are removed, RubiQ is connected to the computer via microUSB cable and a battery is plugged into the drone.
- Press the Connect button in the top right corner of BLHeli. If RubiQ is not able to connect to BLHeli, you may need to download one of the drivers listed on the BLHeli startup page.
- Click the Read Setup button in the bottom right corner of BLHeli. If you have trouble connecting, try disconnecting and reconnecting the micro-USB cable. If that doesn’t help, leave the USB-cable connected while unplugging and reconnecting the LiPo battery.
- As shown in the diagram above, ESC’s 1 and 4 should be configured to spin CW (Normal) and ESC’s 2 and 3 should spin CCW (Reversed). If any of your motors need to be changed, click the motor direction dropdown menu to make changes.
- To save any changes, click the Write Setup button in the bottom right corner.
- Click the Disconnect button in the top right and return to INAV to retest the motor rotation.